|
|
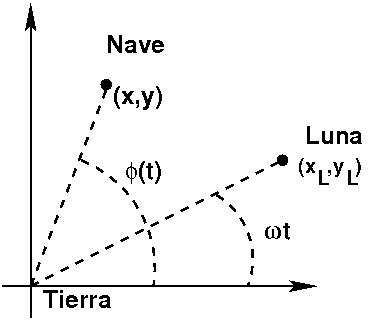
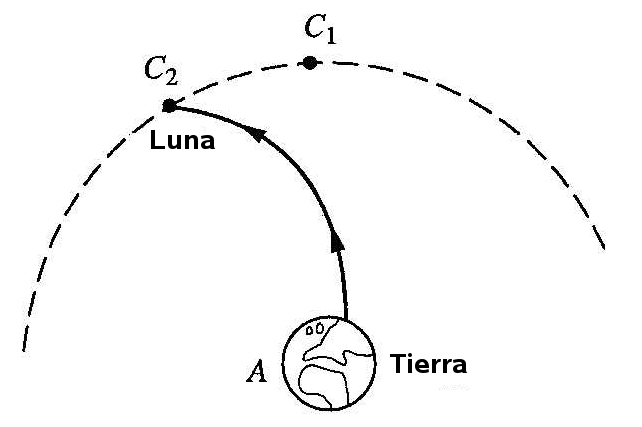 La posición de la Luna en el momento del lanzamiento es C1 y la de llegada C2. La trayectoria de la nave es por tanto una
línea curva cuyo cálculo es, como se ha dicho, muy complicado. Puede ocurrir que la nave, en vez de caer en la Luna, pase
cerca de su superficie. En este caso, dependiendo de su velocidad
y de la distancia de aproximación máxima, la nave seguirá diferentes trayectorias. Puede quedar retenida en una órbita
estable en torno la Luna, pasar cerca de ella y regresar a la Tierra o bien desviarse y perderse en el Sistema Solar. Este fue
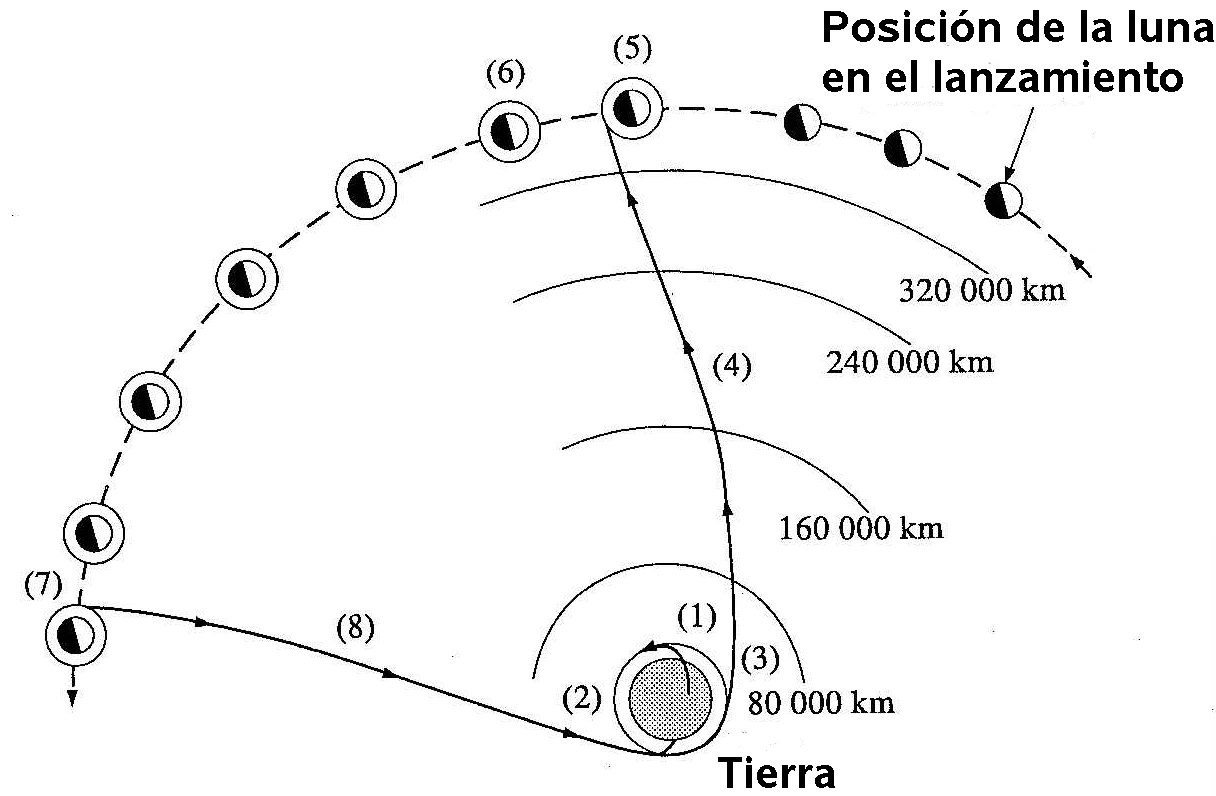
el caso de la sonda Luna 1, lanzada por la antigua Unión Soviética en enero de 1959. Después de acercarse a 8.000 km, Luna
1
entró en órbita elíptica alrededor del Sol con un periodo de 443 días. La primera sonda en llegar a la Luna fue la Luna 2,
lanzada en septiembre de 1959 y cuyo viaje duró 35 horas. La siguiente figura muestra las fases de la misión Apolo que
llevó
a Armstrong y Aldrin a la superficie de la Luna en julio de 1969. En ella se observa que después del lanzamiento (1) la nave
se coloca en una órbita terrestre (2) de la que se separa en el punto (3), para seguir hacia la Luna a lo largo de la
trayectoria
(4) hasta entrar entrar en órbita lunar (5). Posteriormente, el módulo lunar descendió hasa la superficie de la Luna (6) y,
después de completar la misión, regresó a los módulos de comando y de servicio, que habían permanecieron en órbita
(7), para inciar
el viaje de regreso (8).
La posición de la Luna en el momento del lanzamiento es C1 y la de llegada C2. La trayectoria de la nave es por tanto una
línea curva cuyo cálculo es, como se ha dicho, muy complicado. Puede ocurrir que la nave, en vez de caer en la Luna, pase
cerca de su superficie. En este caso, dependiendo de su velocidad
y de la distancia de aproximación máxima, la nave seguirá diferentes trayectorias. Puede quedar retenida en una órbita
estable en torno la Luna, pasar cerca de ella y regresar a la Tierra o bien desviarse y perderse en el Sistema Solar. Este fue
el caso de la sonda Luna 1, lanzada por la antigua Unión Soviética en enero de 1959. Después de acercarse a 8.000 km, Luna
1
entró en órbita elíptica alrededor del Sol con un periodo de 443 días. La primera sonda en llegar a la Luna fue la Luna 2,
lanzada en septiembre de 1959 y cuyo viaje duró 35 horas. La siguiente figura muestra las fases de la misión Apolo que
llevó
a Armstrong y Aldrin a la superficie de la Luna en julio de 1969. En ella se observa que después del lanzamiento (1) la nave
se coloca en una órbita terrestre (2) de la que se separa en el punto (3), para seguir hacia la Luna a lo largo de la
trayectoria
(4) hasta entrar entrar en órbita lunar (5). Posteriormente, el módulo lunar descendió hasa la superficie de la Luna (6) y,
después de completar la misión, regresó a los módulos de comando y de servicio, que habían permanecieron en órbita
(7), para inciar
el viaje de regreso (8).
| (1) |
| (2) |
| (3) |
| (4) |
|
| (9) |
| (10) |
|
|
|
| (20) |
| (21) |
| (22) |
| (23) |
| (24) |
| (25) |
| (26) |
| (27) |
| (28) |
| (29) |
| (30) |
| (31) |
|
|